在可预见的未来,汽车和卡车的使用寿命预计将持续10到20年,这对电子产品的可靠性产生了相应的影响,这一点我们已经知道。更具挑战性的是管理汽车人工智能系统的长期服务时间,特别是考虑到人工智能技术的飞速发展,以及需要对发现的现场服务问题或法规变化进行管理更新。召回车辆进行硬件升级无疑是太过昂贵的做法。同样的,汽车人工智能软件模型服务更新将依赖于可扩展系统,以支持服务技术人员在许多地点处理许多产品线。硬件和软件必须同时具备可扩展性,以支持并简化在车辆使用寿命内的长期更新,并且要支持不断改进的新车架构。

自动泊车
为汽车人工智能硬件提供未来保障
汽车人工智能正在迅速融入车辆的各个方面,不仅在ADAS等明显的功能中使用智能视觉和汽车周围测距,现在还包括用于电动汽车智能电池管理,用于车厢监控系统以跟踪驾驶员意识和乘客状态,以及用于智能降噪的信息娱乐系统。这些智能功能是在分布在汽车周围的定制人工智能处理器上运行的,而我们必须确保这些处理器能够适应未来汽车架构和人工智能技术的演进。
“演进”在这里是一个重要的限制因素。人工智能基础模型偶尔会发生重大的革命性飞跃,比如从卷积神经网络(CNN)到Transformer的模型架构,但更常见的情况是,模型会在汽车生命周期内甚至产品线中以较小的步骤不断演进。如果将人工智能模型看作一个图形,那么许多子图形可以被重复使用,一些子图形可能会被添加或修改,而图形之间的顺序阶段可能会被优化。如果硬件平台的扩展性能足够强,能够处理从经典深度神经网络(DNN)到生成模型等不同类型的图形,而且在性能和功耗上具有竞争力,那么它应该能够处理这种模型演进的水平。但有一个重要的注意事项,将在下一节讨论。
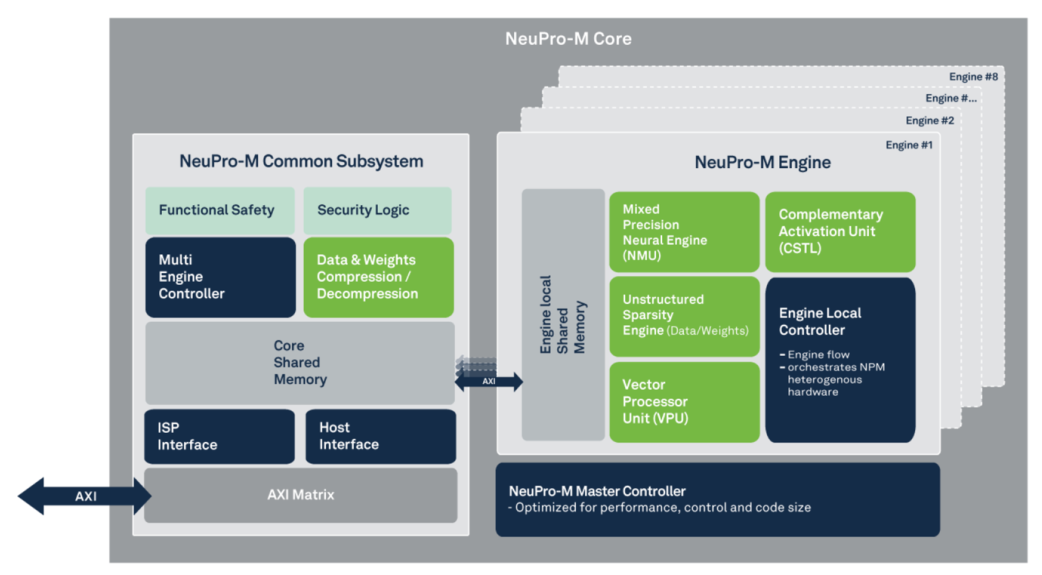
Ceva NeuPro-M是一个非常强大的NPU IP系列,它为嵌入式汽车人工智能设计奠定了基础。这是一个可扩展平台,可根据这些需求进行配置。NeuPro-M可并行运行1到8个引擎,每个引擎都包含一个混合精度神经引擎、一个补充激活单元和一个最先进的稀疏性引擎,可管理权重和数据中任何形式的稀疏性。NeuPro-M与矢量处理单元(VPU)一起,它们共享该该引擎的本地内存,以最大化本地吞吐量。由一个本地控制器负责协调这些功能之间的流程。由一个通用子系统提供引擎之间的顶层协调、下一级共享内存、权重和数据的压缩和解压缩,以及与主机设计的接口。
VPU-高性能定制的关键
在汽车人工智能领域,产品的差异化取决于定制化程度,就像在其他任何设计领域一样。通过利用汽车人工智能硬件本身所支持的操作,产品开发者就可以实现一些改进。但是,要获得更大的优势,则需要添加定制的软件,这些软件不是由人工智能处理器硬件本身所支持的。传感器融合就是一个很好的例子。
想一想自动泊车。这必须融合来自超声波、雷达和视频传感器(或这些传感器的子集)的输入,以确定一个可行的倒车停车路径。这些传感器将各司其职,确定与障碍物的距离,但没有现成的解决方案可以将这些输入融合在一起,以确定路径和接下来的方向盘转向和前后移动的步骤。这些算法是每个汽车制造商都必须设计的。
该算法必须根据2D(或3D)空间中的障碍物和其他感知信息,确定车辆相对于障碍物的曲线路径,同时理解速度以及前后障碍物可能移动的可能性。这就需要进行基于向量的分析。
许多处理器会将这样的计算任务外包给外部的数字信号处理器(DSP)或图形处理器(GPU),然而,由于汽车在非常狭窄的空间内移动,这种做法会带来严重的延迟,这是不可取的。相比之下,在NeuPro-M NPU IP中,每个引擎都嵌入了可编程的VPU。融合算法的某些部分可以被编程在同一引擎中运行,并且与其他神经操作的性能相当,因为它们共享同一本地内存,可为传感和融合提供快速、低延迟的性能。事实上,在Ceva,我们的SensPro2视觉人工智能传感器集线器DSP,就是围绕这一功能打造的,因此它可以与定制的人工智能引擎结合使用,实现高效的芯片和系统设计。
这种性能水平的定制算法开发,可以扩展汽车人工智能算法,可以为未来可能出现的各种进步提供强大的支持,无论是在核心DNN层还是在其他扩展方面,如融合算法等。
为不断发展的人工智能堆栈提供未来保障
提早进行硬件布局来为未来提供保障只一个开端,但它还必须得到面向未来的汽车人工智能模型和软件堆栈的支持。Ceva在支持所有标准网络的接口方面拥有丰富的经验,还提供编译器和优化功能,可映射到基于NeuPro-M的硬件。