

日前,哈工大深圳校区机电工程与自动化学院李兵教授、李曜教授团队在微小型机器人领域取得重要进展,相关研究成果以《基于微观跳跃的单电机机器人多方向平面运动传动》(Multidirectional planar motion transmission on a single-motor actuated robot via microscopic galumphing)为题发表在综合类高水平期刊《先进科学》(Advanced Science)上。
在微型机器人领域,简化驱动形式和减少驱动器数量是一大难题,因为驱动器是限制机器人尺寸的关键因素。为了突破这一瓶颈,李兵、李曜团队探索了一种全新的驱动方法,其灵感来源于海豹的踱步跳动方式。这种方法能够使仅采用单一电机的刚体机器人在欠驱动条件下实现直行、弧行、转向等灵活运动,为单电机驱动移动机器人的设计提供了全新思路。

现有的微型机器人大多依靠集成多个执行器来确保灵活性,但系统的复杂度限制了其进一步微型化。而只采用一个执行器的机器人,虽然结构简单,却在平面运动的灵活性和精度方面存在严重不足。为了解决这一问题,该研究团队引入了一项名为“偏心力驱动的多方向运动传递(ERDMT)”的创新技术。该技术仅利用一个倾斜的偏心电机和一个双腿结构就实现了灵活的平面运动。基于ERDMT技术的机器人仅需4个零件,便可以灵活自如地实现复杂的运动轨迹。
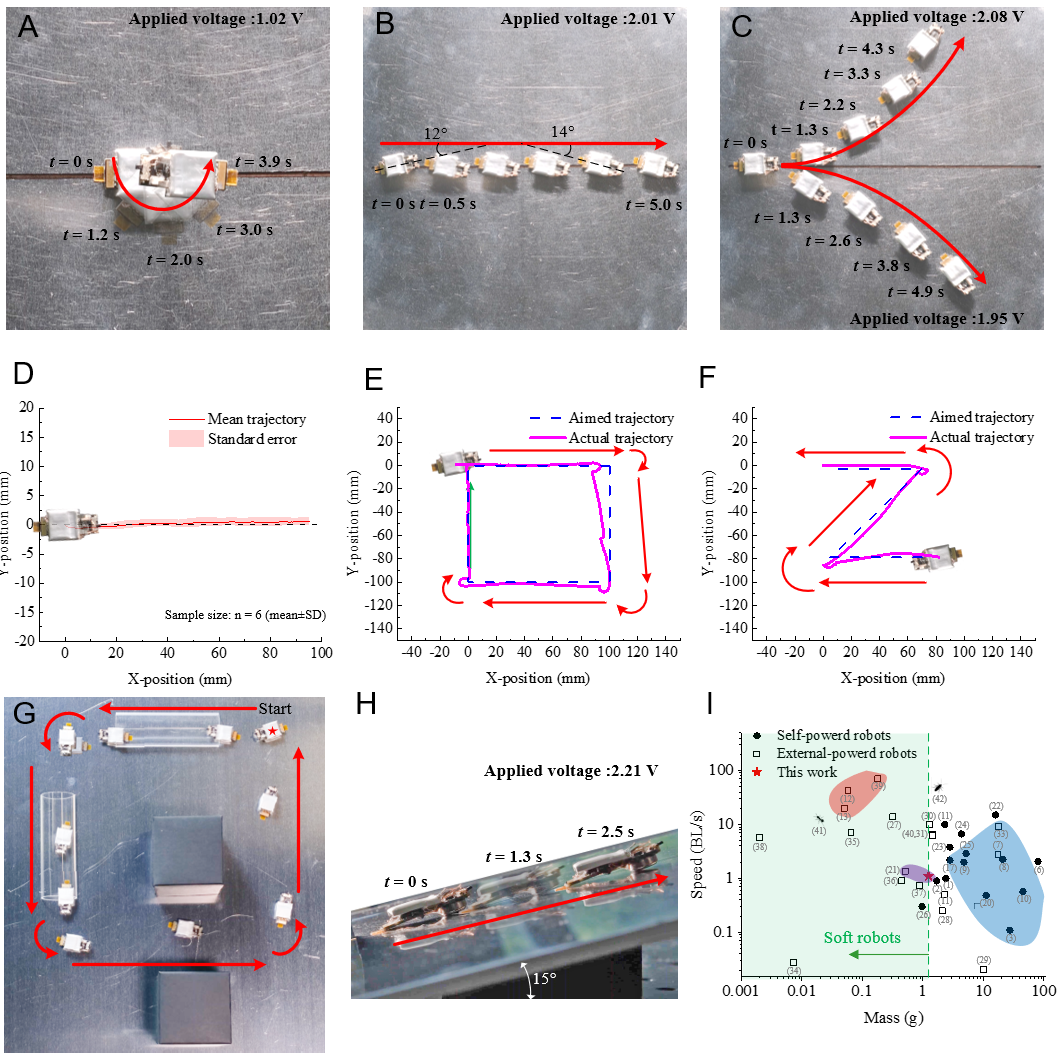
本研究提出了一种基于偏心旋转的“踱步跳跃”传动技术。该技术能够在特定转速范围内,使系统稳定地实现微观尺度(30-400 µm)的踱步跳跃运动,并首次实现了单电机偏心旋转驱动下的直行运动。这项技术基于一个简单而巧妙的原理:通过调节电机转速,即可控制机器人的前进运动和双向转向,无需复杂的电机相位控制或正反转调节。ERDMT技术为微型机器人平面运动驱动提供了一种更直接、更简洁的途径。
研究发现,微观运动的周期特性改变会影响机器人的宏观运动轨迹。其核心原理在于,不同的周期性运动会导致偏心转子产生不同的触地相位,进而改变地面反力。因此,只需改变驱动电压来调节电机产生的偏心转速,即可控制机器人形成不同的宏观轨迹。
基于该驱动原理,团队研制出了一款名为GASR的微型爬行机器人,其重量仅为1.2克。得益于其稳定、精确的运动性能,GASR即使在没有反馈控制的情况下,也能够灵活地穿行于各种障碍物。
论文(共同)第一作者为机电工程与自动化学院硕士生唐灵奇、王诚昊,通讯作者为机电工程与自动化学院教授李兵、李曜。该研究得到了国家重点研发计划、国家自然科学基金和深圳市科技计划等项目的支持。





评论
文明上网理性发言,请遵守新闻评论服务协议
登录参与评论
0/1000