

3月14日,北京理工大学集成电路与电子学院周治国副教授团队与苏州同元软控信息技术有限公司联合推出基于MWORKS的具身空间仿真平台(Embodied Space Simulation Platform)框架,探索形成具身智能无人船案例。
具身信息物理系统(Embodied Cyber-Physical System,ECPS)是一种将具身智能体深度集成到信息物理系统框架中的新型系统架构。它不仅包含了传统CPS中的物理系统、网络系统和信息系统,还特别强调具身智能体在其中的核心作用。具身空间(Embodied Space)是一个综合性的智能环境,有机结合了物理空间、虚拟空间和数据空间,融合了虚拟现实、计算通信、感知融合、决策推理和机器人控制等多种先进技术。
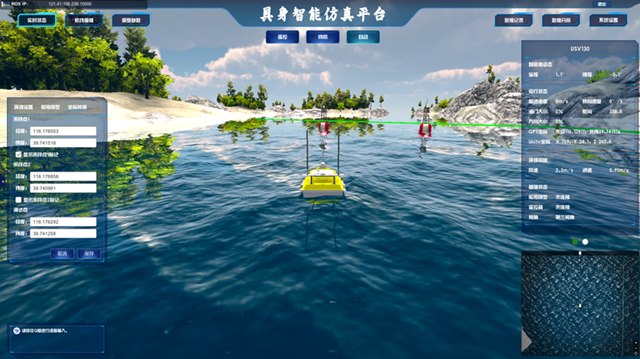
基于MWORKS的具身空间仿真平台是一个高度综合的人工智能平台,能够实现具身空间建模、无人系统建模与仿真、智能体开发与训练、实地部署与测试多项功能。它通过集成物理空间、虚拟空间和数据空间,支持无人系统的感知、学习、推理和行动,旨在提升无人系统的具身智能。通过其关键模块(如虚拟仿真引擎、生成智能引擎和推理进化引擎等)来实现具身空间的构建和功能支持。
该平台采用三维虚拟引擎构建高保真场景,基于MWORKS平台构建智能体信息物理融合虚拟仿真环境,支持复杂场景动态建模及多智能体系统的集群协同训练,涵盖无人机、无人车、机器狗等无人系统的导航、决策与交互任务。通过融合强化学习框架、ROS通讯协议及Python算法接口,提供从虚拟仿真到数字孪生的全链路闭环验证能力,支持用户快速部署自定义算法,并实现自主导航、环境感知、任务抓取等功能的跨场景适配,为工业自动化、智慧城市及机器人研发提供安全、高效、可扩展的智能训练基础设施。
具身空间模拟器
(Embodied Space Simulator,ES-Sim)
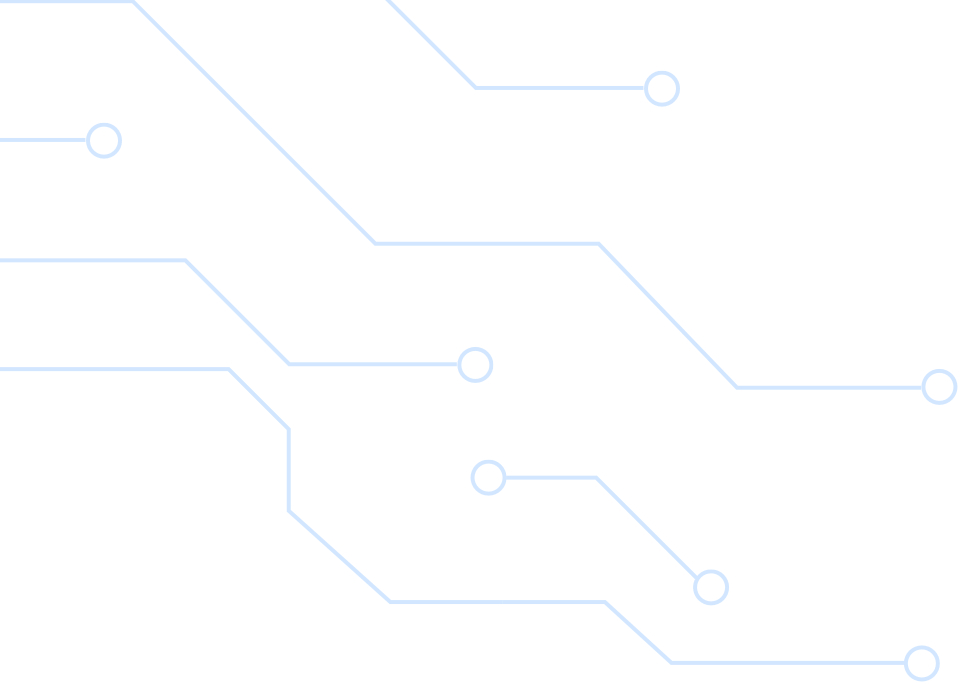
具身智能无人船是具身空间仿真平台的典型应用案例。由基于MWORKS的数字无人船、基于ROS的无人船开源框架、基于Unity的虚拟三维仿真引擎、基于PyTorch的深度强化学习神经网络,并集成了deepseek大模型5部分组成。
基于MWORKS平台构建的无人船数字样机包括三自由度本体模型和导航控制算法,无人船本体模型能够考虑无人船风、浪、流等各种扰动的情况下实现无人船速度、航向角等航行参数的理论计算,既为航线决策和路线规划提供理论依据,又能够与导航控制算法形成控制闭环,在虚拟空间内实现算法的设计验证。运行过程中,系统支持动态调整环境参数(风浪流强度、障碍物分布),并通过PyTorch的在线学习机制持续优化策略网络,确保无人艇在复杂场景下的自主导航与任务适应性。
通过deepseek大模型实现自然语言交互与智能化任务管理。系统支持语音/文本指令输入(如“绕行障碍”“切换航线”“多目标巡检”),大模型解析指令后,结合实时感知数据(激光雷达、视觉信息)与船舶状态,动态生成任务优先级与局部路径策略,并调用强化学习模块(PPO/TD3)优化决策指令。针对复杂任务(协同作业、动态场景适配),通过ROS通信联动数字样船与仿真环境,自动拆解任务为可执行子目标,调整航行参数与路径规划权重。训练阶段融合历史交互数据与强化学习奖励反馈,优化指令-动作映射逻辑,提升系统在未知场景下的语义理解与任务泛化能力,形成“人类指令-智能决策-闭环验证”的一体化交互链路。
基于Unity虚拟仿真环境加载预设水域场景与船舶数字样机,并通过ROS-TCP通信协议绑定传感器数据流(激光雷达、视觉相机)与物理引擎参数;在ROS框架内启动避障算法节点,加载预训练的PPO/TD3强化学习模型及监督学习策略,同步运行MWORKS.Sysplorer进行船舶动力学计算;运动控制模块根据实时决策指令(路径规划、避障角速度)驱动数字样船模型,并通过ROS Topic反馈船舶位姿、环境交互状态至仿真界面;最终形成“感知数据采集-算法在线推理-控制指令执行-物理状态回传”的实时闭环。运行过程中,系统支持动态调整环境参数(风浪流强度、障碍物分布),并通过PyTorch的在线学习机制持续优化策略网络,确保无人艇在复杂场景下的自主导航鲁棒性与任务适应性。
具身空间仿真平台案例:具身智能无人船
同时,团队正在积极推动开设《具身智能仿真与建模》课程和相关教材编写工作,教材将系统性地阐述具身智能的背景知识、研究现状及主流框架,介绍基于MWORKS具身物理信息系统建模和仿真的基础知识,确保读者能够从理论到实践全面掌握具身智能的核心内容。并将重点介绍基于MWORKS的具身智能框架,涵盖ROS(机器人操作系统)、三维虚拟仿真环境以及MWORKS计算引擎等内容,充分展现国产化仿真平台在具身智能领域的强大实力和广泛应用前景。





评论
文明上网理性发言,请遵守新闻评论服务协议
登录参与评论
0/1000