

软驱动器作为一种具有巨大潜力的技术,广泛应用于软夹具、人工肌肉和仿生系统等领域,能够在光、温度、磁场和电场等多种外部刺激下实现精准变形。其中,光致驱动具有显著优势,能够远程精确控制,并且具有波长、偏振和强度等多种可调参数。然而,传统基于自由空间光的驱动方式面临光散射、吸收和折射等问题的制约,限制了其在复杂环境中的应用。
光纤作为一种柔性波导,提供了低衰减的光传播路径,避免了介质界面带来的散射和折射。因此,基于光纤的光驱动器能够在此前无法到达的地方发挥作用,如通过弯曲导管在体内进行精准操作。
尽管光驱动器和光纤技术已有诸多研究进展,但它们的有效集成仍然面临诸多困难。通常,光驱动器需要较薄的结构才能实现快速响应和大幅度变形,然而现有的驱动器与光纤的集成方法通常要求二者尺寸相当,使得驱动器的厚度在几十到几百微米尺度,大大限制了驱动器的性能。

近日,复旦大学材料科学系崔继斋/梅永丰课题组基于薄膜自卷曲技术,将高性能的超薄驱动器卷绕在锥形光纤波导尖端,实现了一种具有超快响应和大弯曲角度的光波导微型驱动器,并展现出对快速运动微生物的精准捕获能力。相关成果以“Waveguide Microactuators Self-Rolled Around an Optical Fiber Taper”为题发表在《先进材料》(Advanced Materials)期刊上。
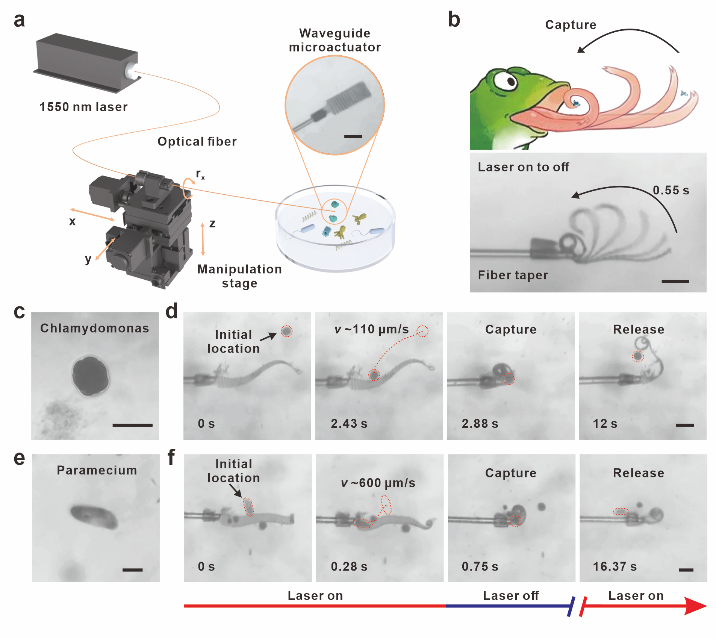
图1.光波导微型驱动器的系统设计以及对衣藻和草履虫的精准捕获。
该研究设计了一种基于水凝胶和纳米金薄膜双层异质结构的微驱动器,成功将2微米厚的超薄驱动器通过自卷曲的方式固定在锥形光纤尖端(图1)。这种超薄水凝胶具有具有极低的弯曲刚度,并能够在相变过程中快速吸收和释放水分子,使光波导微驱动器在超快的响应时间(0.55秒)内展现出超大的弯曲角度显著的弯曲角度(>800°)。凭借这一特性,该驱动器在微尺度成功捕获了快速游动的衣藻和草履虫,实现了微纳机械对于微生物的精准操控,并进一步展示了可编程的非往复运动,能够有效非接触式操纵酵母细胞等。
这项研究为微尺度操作提供了多功能平台,展现出在生物医学应用中的广泛前景。未来,光波导微驱动器可与纳米传感器集成,应用于微尺度生物细胞研究;或与导管技术结合,实现更复杂的体内微观操作。这项技术在封闭环境中尤其是无法进行自由空间光照明的情况下具有广泛的应用潜力。
论文第一作者为材料科学系博士生宗旸,崔继斋青年研究员为论文的通讯作者。该研究得到了国家重点研发计划、国家自然科学基金、上海市科委等项目的资助和支持。
文章链接:https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202418316





评论
文明上网理性发言,请遵守新闻评论服务协议
登录参与评论
0/1000